0755-83318988
 更新時間:2025-08-01
更新時間:2025-08-01 點擊次數:353
點擊次數:353
三坐標測量的微米級精度背后,是精密的路徑規劃算法與實時補償技術在保駕護航。三坐標測量機的智能避撞算法保障了測量的安全與高效;溫度補償技術消除了環境的無形干擾;點云智能處理則讓海量數據蛻變為精準的工程決策依據。
面對復雜工件與夾具,傳統直線路徑極易引發碰撞。智能避讓路徑(如圓弧避撞)的核心在于精準的數學建模與空間解析:
將測頭、加長桿、工件、夾具等關鍵實體在測量空間內進行離散化表達,構建其運動包絡體的數學邊界模型,這是三坐標測量機(CMM)實現智能避撞的核心基礎。
體素化建模的本質是:用空間網格的“占位符"替代復雜幾何體,將碰撞問題轉化為高效的網格狀態查詢。它平衡了精度與速度,使三坐標能在微米級測量中實現“零碰撞"的智能運動控制,是算法“看見"物理空間的核心基石。
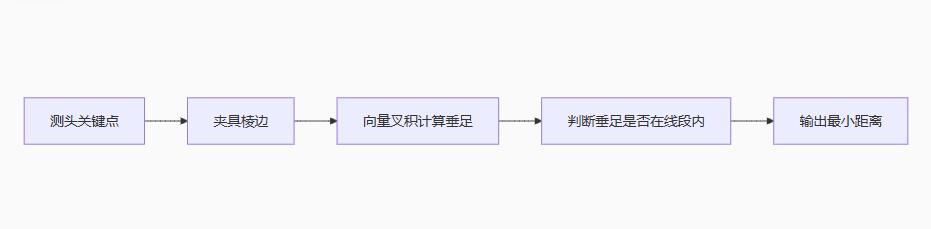
基于計算幾何(如向量叉積判斷點線關系、分離軸定理SAT進行凸包快速碰撞測檢測),在路徑規劃時實時計算測頭系統與障礙物的最小距離。
關鍵技術1:向量叉積判斷點線關系
關鍵技術2:分離軸定理(SAT)
核心原理:兩凸體未碰撞 ? 存在一條分離軸,使兩物體在該軸上的投影區間不重疊。

向量叉積解決點/線/面之間的精確距離計算;分離軸定理解決凸體之間的碰撞存在性判斷。兩者結合,在保證微米級安全精度的同時,滿足三坐標運動控制的毫秒級實時響應需求,是智能避撞系統的“神經反射弧"。
實時干涉檢測算法的本質就是用計算幾何將物理碰撞問題轉化為高效的向量運算與投影區間判斷。
當檢測到潛在碰撞風險,算法自動計算“安全球半徑"與“切點"。依據空間解析幾何原理,生成繞過障礙物的優圓弧路徑參數方程(圓心坐標、半徑、起止角)。其關鍵在于保證路徑連續光滑(C1或C2連續),避免測頭急停急啟引入振動誤差。
應用樣條曲線(如B樣條、NURBS)對連接點進行平滑處理,確保測量運動平穩,減少動態誤差。
此過程將工程師的經驗轉化為精確的數學規則,實現測量過程“零碰撞"與效率大化。
溫度變化是微米級測量的“隱形殺手"。現代三坐標測量機溫度補償技術融合材料科學與實時算法:
(1)設備補償:基于機體溫感網絡實時數據,利用機床材料(如花崗巖、陶瓷、鋼)的已知熱膨脹系數(CTE),通過空間網格模型補償因溫度梯度導致的CMM結構變形。

(圖:中圖三坐標)
(2)工件補償:核心難點。需輸入被測工件材料的精確CTE(或從數據庫匹配)。補償算法依據實時工件溫度(通常通過非接觸紅外測溫或多點接觸測溫獲取)與標準溫度(如20℃)的差值ΔT,對每個測量點坐標進行動態修正:`補償值 = 原始坐標 * CTE * ΔT`。
補償計算需在毫秒級完成,內嵌于CMM控制系統的實時內核。算法需高效處理空間坐標變換,將溫度影響量實時疊加到測量結果上。
整合機體溫感數據、工件溫感數據、環境溫濕度數據,構建綜合補償模型,顯著提升復雜工況下的測量可靠性。
從密集掃描點到直觀的形位公差報告,需經歷嚴謹高效的數據處理鏈:
(1)掃描路徑規劃:依據待測特征(自由曲面、孔、槽等)智能生成優點云采集路徑。
(2)點云去噪濾波:應用統計濾波、半徑濾波、高斯濾波剔除離群噪點與異常值。
(3)點云精簡:在保證特征精度的前提下,使用曲率采樣、均勻網格采樣等方法降低數據量,提升后續處理速度。
(1)幾何特征擬合:應用最小二乘法、最小區域法、最大內切/最小外接等算法,將點云擬合為精確的平面、圓柱、球、圓錐等幾何元素。
(2)自由曲面重構:利用NURBS曲面或三角網格精確還原復雜曲面形態。
(3)基準建立與對齊:依據圖紙要求建立基準參考系(Datum Reference Frame, DRF),通過坐標變換(如最佳擬合對齊、3-2-1對齊)將測量數據與CAD模型或理論坐標系精確匹配。
(1)GD&T 算法引擎:核心模塊。依據ASME Y14.5或ISO GPS標準,計算位置度、輪廓度、平行度、圓跳動等所有形位公差項。例如,位置度計算需基于DRF,找到被測要素實際位置相對其理論位置的最大允許變動區域。
(2)可視化與報告:生成包含公差帶圖示、偏差色譜圖、數據表格的詳細報告。直觀展示工件何處超差、超差量值,為工藝改進提供精準依據。
三坐標測量機的微米級精度,是數學、物理、計算機科學與精密機械深度融合的結晶。智能避撞算法、溫度補償技術、點云智能處理,掌握這些核心算法,就掌握了在微觀尺度上洞察質量、驅動精造的“金鑰匙"。隨著AI與工業物聯網的滲透,三坐標測量技術將持續突破物理極限,為智能制造提供更強大的質量保障基石。

 當前位置:
當前位置:

 三坐標測量儀
三坐標測量儀
